Simulation-first autonomy engineering
A practical simulator stack built around PX4 SITL, ArduPilot, ROS 2 Humble, Gazebo, and Isaac Sim, designed for repeatable scenarios, measurable outcomes, and clean integration into real development workflows.
Built for engineering teams who need repeatability: validate, iterate, and ship with confidence.
Request simulator access
Start with a work email, then add platform type, autonomy goals, and constraints if useful.
What it’s for
A simulator you can actually build and validate against—structured for real engineering outcomes.
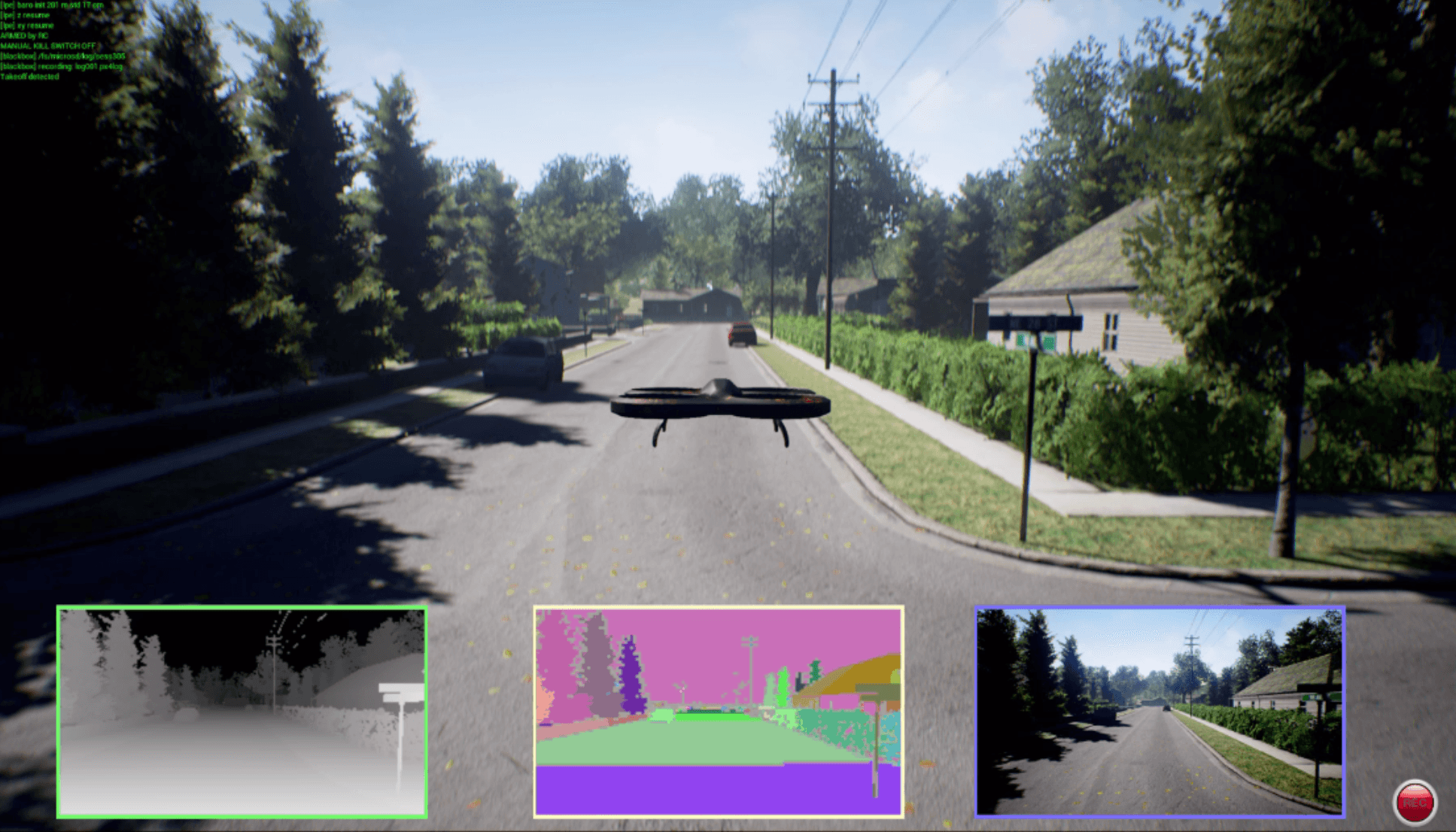
PX4, ArduPilot, Gazebo, and Isaac Sim
A simulator-first engineering loop that validates behavior, edge cases, and controls before hardware spend.
Scenario-driven validation
Repeatable test scenarios with measurable outcomes (success rate, drift, recovery, comms loss behavior).
Realistic integration surfaces
Offboard compute, perception stacks, and software integration paths that match how teams ship real systems.
Clear handoff artifacts
Scenario packs, parameter sets, and integration notes suited for internal QA and collaborative engineering reviews.
Capabilities
The surfaces that matter: software validation, controls loops, and CI-friendly simulation workflows.
Vehicle coverage
- Multicopters, fixed-wing, rovers, boats, hybrids (program dependent)
- Control logic, failsafes, comms loss, degraded sensors
- Parameter-set validation and repeatable test runs
Autonomy & perception workflows
- Perception-driven testing loops (visual SLAM / perception)
- Adaptive behaviors, tracking workflows, and application-specific autonomy
- Metrics-first evaluation (drift, recovery, completion rate)
Engineering-grade integration
- Docker-based headless simulation (CI-friendly)
- Offboard APIs and control surfaces aligned with real deployments
- Control software integration for simulated workflows (when applicable)
Scale & reliability
- Batch runs, regression checks, and scenario packs
- Deterministic-ish test conditions and versioned configs
- Designed for teams who need repeatability, not demos
Use cases
Practical, high-leverage ways teams use the simulator to reduce risk and ship faster.
Flight stack validation before field tests
Prove behavior under edge cases (failsafes, comms loss, sensor degradation) before risking hardware.
Autonomy development loops
Train and validate offboard autonomy against scenario suites with measurable metrics.
Project readiness
Produce artifacts teams can review together: scenarios, expected outcomes, and integration notes.
Request Simulator access
Share your platform type, autonomy goals, and constraints. We’ll respond with a recommended simulator plan and onboarding steps.
PX4 · ArduPilot · Gazebo · Isaac Sim
Request simulator access
Share a work email and we’ll follow up with a practical simulator plan.